代价函数
首先给出结论:
损失函数(Loss Function )是定义在单个样本上的,算的是一个样本的误差。
代价函数(Cost Function )是定义在整个训练集上的,是所有样本误差的平均,也就是损失函数的平均。
目标函数(Object Function)定义为:最终需要优化的函数。等于经验风险+结构风险(也就是Cost Function + 正则化项)。
关于目标函数和代价函数的区别还有一种通俗的区别:
目标函数是最大化或者最小化,而代价函数是最小化
举个例子解释一下:(图片来自Andrew Ng Machine Learning公开课视频)
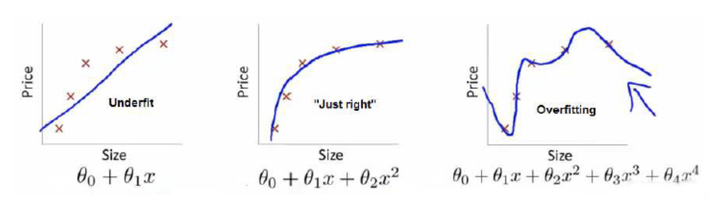
上面三个图的函数依次为 ,
,
。我们是想用这三个函数分别来拟合Price,Price的真实值记为
。
我们给定 ,这三个函数都会输出一个
,这个输出的
与真实值
可能是相同的,也可能是不同的,为了表示我们拟合的好坏,我们就用一个函数来度量拟合的程度,比如:
,这个函数就称为损失函数(loss function),或者叫代价函数(cost function)(有的地方将损失函数和代价函数没有细分也就是两者等同的)。损失函数越小,就代表模型拟合的越好。
那是不是我们的目标就只是让loss function越小越好呢?还不是。
这个时候还有一个概念叫风险函数(risk function)。风险函数是损失函数的期望,这是由于我们输入输出的 遵循一个联合分布,但是这个联合分布是未知的,所以无法计算。但是我们是有历史数据的,就是我们的训练集,
关于训练集的平均损失称作经验风险(empirical risk),即
,所以我们的目标就是最小化
,称为经验风险最小化。
到这里完了吗?还没有。
如果到这一步就完了的话,那我们看上面的图,那肯定是最右面的 的经验风险函数最小了,因为它对历史的数据拟合的最好嘛。但是我们从图上来看
肯定不是最好的,因为它过度学习历史数据,导致它在真正预测时效果会很不好,这种情况称为过拟合(over-fitting)。
为什么会造成这种结果?大白话说就是它的函数太复杂了,都有四次方了,这就引出了下面的概念,我们不仅要让经验风险尽量小,还要让结构风险尽量小。。这个时候就定义了一个函数 ,这个函数专门用来度量模型的复杂度,在机器学习中也叫正则化(regularization)。常用的有
,
范数。
到这一步我们就可以说我们最终的优化函数是: ,即最优化经验风险和结构风险,而这个函数就被称为目标函数。
结合上面的例子来分析:最左面的 结构风险最小(模型结构最简单),但是经验风险最大(对历史数据拟合的最差);最右面的
经验风险最小(对历史数据拟合的最好),但是结构风险最大(模型结构最复杂);而
达到了二者的良好平衡,最适合用来预测未知数据集。
二:详解代价函数
什么是代价函数
假设有训练样本(x, y),模型为h,参数为θ。h(θ) = θTx(θT表示θ的转置)。
(1)概况来讲,任何能够衡量模型预测出来的值h(θ)与真实值y之间的差异的函数都可以叫做代价函数C(θ),如果有多个样本,则可以将所有代价函数的取值求均值,记做J(θ)。因此很容易就可以得出以下关于代价函数的性质:
(2)当我们确定了模型h,后面做的所有事情就是训练模型的参数θ。那么什么时候模型的训练才能结束呢?这时候也涉及到代价函数,由于代价函数是用来衡量模型好坏的,我们的目标当然是得到最好的模型(也就是最符合训练样本(x, y)的模型)。因此训练参数的过程就是不断改变θ,从而得到更小的J(θ)的过程。理想情况下,当我们取到代价函数J的最小值时,就得到了最优的参数θ,记为:
minθJ(θ)minθJ(θ)
例如,J(θ) = 0,表示我们的模型完美的拟合了观察的数据,没有任何误差。
(3)在优化参数θ的过程中,最常用的方法是梯度下降,这里的梯度就是代价函数J(θ)对θ1, θ2, ..., θn的偏导数。由于需要求偏导,我们可以得到另一个关于代价函数的性质:
- 选择代价函数时,最好挑选对参数θ可微的函数(全微分存在,偏导数一定存在)
代价函数的常见形式
经过上面的描述,一个好的代价函数需要满足两个最基本的要求:能够评价模型的准确性,对参数θ可微。
(1)在线性回归中,最常用的是均方误差(Mean squared ERROR),即
J(θ0,θ1)=12m∑i=1m(y^(i)−y(i))2=12m∑i=1m(hθ(x(i))−y(i))2J(θ0,θ1)=12m∑i=1m(y^(i)−y(i))2=12m∑i=1m(hθ(x(i))−y(i))2
m:训练样本的个数;
hθ(x):用参数θ和x预测出来的y值;
y:原训练样本中的y值,也就是标准答案
上角标(i):第i个样本
(2)在逻辑回归中,最常用的是代价函数是交叉熵(Cross Entropy),交叉熵是一个常见的代价函数,在神经网络中也会用到。
回到线性回归模型中,训练集和代价函数如下图


如果我们还用J(θ)函数做为逻辑回归模型的代价函数,用H(x) = g(θ^T * x),曲线如下图所示
发现J(θ)的曲线图是"非凸函数",存在多个局部最小值,不利于我们求解全局最小值

因此,上述的代价函数对于逻辑回归是不可行的,我们需要其他形式的代价函数来保证逻辑回归的代价函数是凸函数。
这里我们先对线性回归模型中的代价函数J(θ)进行简单的改写

用Cost(h(x), y) = 1/2(h(x) - y)^2 代替

在这里我们选择对数似然损失函数做为逻辑回归模型的代价函数,Cost函数可以表示如下

分析下这个代价函数
(1). 当y=1的时候,Cost(h(x), y) = -log(h(x))。h(x)的值域0~1,-log(h(x))的曲线图,如下

从图中可以看出
- h(x)的值趋近于1的时候,代价函数的值越小趋近于0,也就是说预测的值h(x)和训练集结果y=1越接近,预测错误的代价越来越接近于0,分类结果为1的概率为1
- 当h(x)的值趋近于0的时候,代价函数的值无穷大,也就说预测的值h(x)和训练集结果y=1越相反,预测错误的代价越来越趋于无穷大,分类结果为1的概率为0
(2). 当y=0的时候, Cost(h(x), y) = -log(1-h(x))。h(x)的值域0~1,-log(1-h(x))的曲线图,如下

从图中可以看出
- h(x)的值趋近于1的时候,代价函数的值趋于无穷大,也就是说预测的值h(x)和训练集结果y=0越相反,预测错误的代价越来越趋于无穷大,分类结果为0的概率为1-h(x)等于0
- 当h(x)的值趋近于0的时候,代价函数的值越小趋近于0,也就说预测的值h(x)和训练集结果y=0越接近,预测错误的代价越来越接近于0,分类结果为0的概率为1-h(x)等于1
为了统一表示,可以把Cost(h(x), y)表达成统一的式子,根据前面J(θ)的定义,J(θ)等于

特别说明:
1. 当y=1的时候,第二项(1-y)log(1-h(x))等于0
2. 当y=0的时候,ylog(h(x))等于0
从上面2点可以看出,J(θ)表达式符合前面定义
根据线性回归求代价函数的方法,可以用梯度下降算法求解参数θ


从上图可以看出,θj更新和线性回归中梯度下降算法的θj更新一致,差别的是假设函数h(x)不同
J(θ)=−1m[∑i=1m(y(i)loghθ(x(i))+(1−y(i))log(1−hθ(x(i)))]J(θ)=−1m[∑i=1m(y(i)loghθ(x(i))+(1−y(i))log(1−hθ(x(i)))]
符号说明同上
(3)学习过神经网络后,发现逻辑回归其实是神经网络的一种特例(没有隐藏层的神经网络)。因此神经网络中的代价函数与逻辑回归中的代价函数非常相似:
J(θ)=−1m[∑i=1m∑k=1K(y(i)kloghθ(x(i))+(1−y(i)k)log(1−(hθ(x(i)))k)]J(θ)=−1m[∑i=1m∑k=1K(yk(i)loghθ(x(i))+(1−yk(i))log(1−(hθ(x(i)))k)]
参考:https://www.zhihu.com/question/52398145
:https://www.cnblogs.com/nowornever-L/p/6878210.html
:http://blog.csdn.net/chenguolinblog/article/details/52305257