雷达信号
1、单频信号
信号的数学表达式
s(t)=A(t)cos(ωt+ϕ0)
clc
clear all
close all
T = 1;%采样时间
f = 1e5;%采样率
t = 0:1/f:(T-1/f); % 采样点
n = length(t); % 采样点数
A_danpin = 10;
f_danpin = 1000;
y_danpin = A_danpin*cos(2*pi*f_danpin*t);
figure(1);
plot(t(1:1000),y_danpin(1:1000))
xlabel('t/s')
ylabel('幅度 / V')
title('单频脉冲信号')
grid on;
axis([0 0.01 -10.5 10.5])

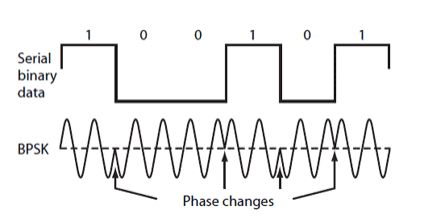
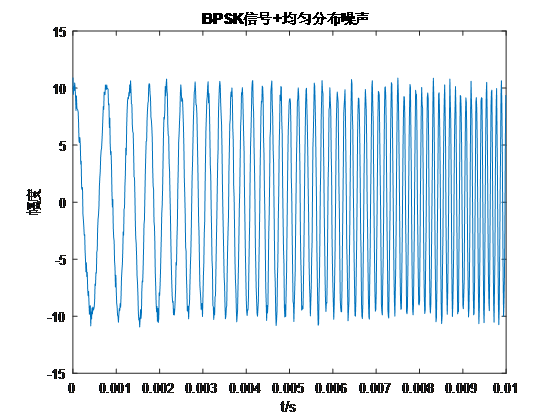
2、BPSK信号
BPSK信号是二进制相移键控信号的简称,它是将模拟信号转换成数字信号的一种方式。它采用一定频率、一定相位的正弦波作为基波,利用相位的差异反映01信息。如令0相位的正弦脉冲表示0信号,则π相位的正弦信号,亦或称为0相位的余弦信号就表示1信号。这种相移属于绝对相移。其代表波形如下图。
clc
clear all
close all
T = 1;%采样时间
f = 1e5;%采样率
t = 0:1/f:(T-1/f); % 采样点
n = length(t); % 采样点数
% 二进制相移键控,0到1,1到0,绝对相位控制
binary_code = '1001100110';
len_code = length(binary_code);
% 一个码元对应的脉冲长度
f_bpsk = 1000; % 频率1000Hz,周期1ms
T_bpsk = 1/f_bpsk;
A_bpsk = 10; % 幅值
t_mayuan = 0:1/f:(T_bpsk-1/f); % 一个码元所持续的时间内的采样点时刻
y_mayuan = A_bpsk*sin(2*pi*f_bpsk*t_mayuan); % 一个码元的波形,用于表示0
t_bpsk = 0:1/f:(T_bpsk*len_code-1/f);
y_bpsk = [];
for i=1:len_code
tmp = str2num(binary_code(i));
if tmp == 0
y_bpsk = [y_bpsk,y_mayuan];
end
if tmp == 1
y_bpsk = [y_bpsk,-y_mayuan];
end
end
figure(2)
plot(t_bpsk,y_bpsk)
grid on;
xlabel('t/s');
title('‘1001100110’的BPSK编码信号');
axis([0 1e-2 -2*A_bpsk 2*A_bpsk]);

3、LFM信号
LFM信号又称Chirp信号、线性调频信号,是一种信号频率随着时间而增加的信号。由于其在一段时间内频率逐渐升高,像声调逐渐升高的鸟鸣,因此才称为Chirp信号。根据这一特点,我们首先可以写出其表达式
s(t)=A(t)cos(2πf0t+πkt2+ϕ0)
式中,A(t)依然表示包络信号,信号的相位为2πf0t+πkt2+ϕ0,相位对时间t求导即可得到频率随时间的关系,亦即
f(t)=2πf0+2πkt
我们根据上式可以得到两个结论。一是LFM信号的脉冲时间不能无限长,因为频率与时间成正比关系,而频率自然不能无穷大。二是LFM信号具有初始频率为f0,其增长率为k,因此其频域波形是一段起点不为0的连续波形,如果包络为直流信号,那么频域波形也呈现直流形式。
clc
clear all
close all
T = 1;%采样时间
f = 1e5;%采样率
t = 0:1/f:(T-1/f); % 采样点
n = length(t); % 采样点数
% 线性调频信号 s(t)=a(t)cos[2πf0 t+πkt^2],a(t)是包络,f0是调频频率
A_lfm = 10;
f_lfm = 1000;
k_lfm = 800000;
y_lfm = A_lfm*cos(2*pi*f_lfm*t+pi*k_lfm*t.^2);
figure(3)
plot(t(1:500),y_lfm(1:500));
xlabel('t/s');
title('线性调频信号波形');
axis([0 0.005 -A_lfm A_lfm]);

4、噪声信号
clc
clear all
close all
T = 1;%采样时间
f = 1e5;%采样率
t = 0:1/f:(T-1/f); % 采样点
n = length(t); % 采样点数
A_bpsk = 10
% 均匀分布噪声
a=-A_bpsk*0.1;%(a-b)均匀分布下限
b=A_bpsk*0.1;%(a-b)均匀分布上限
% a=-A_danpin*0.1;%(a-b)均匀分布下限
% b=A_danpin*0.1;%(a-b)均匀分布上限
% a=-A_danpin*0.1;%(a-b)均匀分布下限
% b=A_danpin*0.1;%(a-b)均匀分布上限
rand('state',0); %把均匀分布伪随机发生器置为0状态
u=rand(1,n); %产生(0-1)单位均匀信号
y_junyun=(b-a)*u+a; %广义均匀分布与单位均匀分布之间的关系
figure(4)
subplot(2,1,1),plot(t(1:1000),y_junyun(1:1000)),title('均匀分布噪声信号');%输出信号图
xlabel('t/s');
subplot(2,1,2),hist(y_junyun,a:0.02:b),title('均匀分布噪声信号直方图'); %输出信号的直方图
xlabel('幅值分布');
ylabel('样本点数');
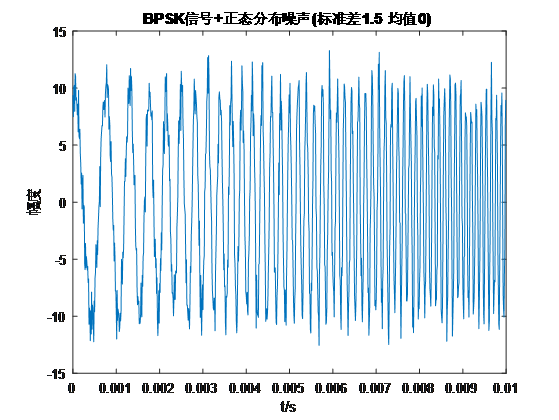
% 正态分布噪声
biaozhuncha = 1.5;
%junzhi = A_danpin*0.05;
junzhi = 0;
rand('state',0); %把均匀分布伪随机发生器置为0状态
u=randn(1,n); %产生(0-1)单位均匀信号
y_normal=biaozhuncha*u+junzhi; %广义均匀分布与单位均匀分布之间的关系
figure(5)
subplot(2,1,1),plot(t(1:10000),y_normal(1:10000)),title('正态分布噪声信号'); %输出信号图
xlabel('t/s');
subplot(2,1,2),hist(y_normal,-biaozhuncha*5+junzhi:0.1:biaozhuncha*5+junzhi),title('正态分布噪声信号直方图'); %输出信号的直方图
xlabel('幅值分布');
ylabel('样本点数');


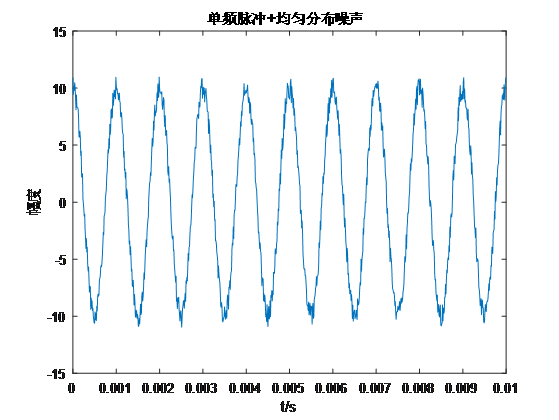
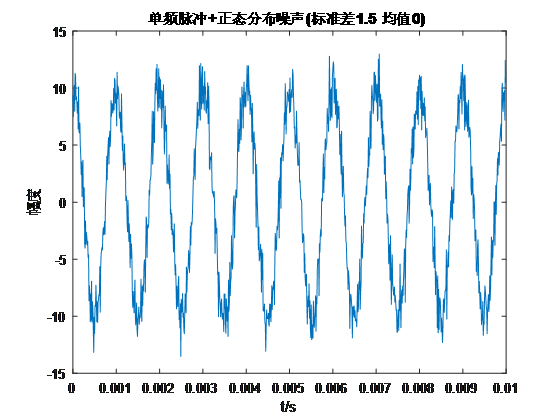
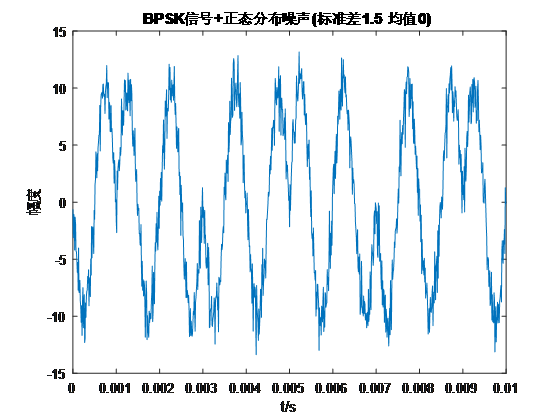
5、有用信号加入噪声

相关阅读
注:本博客是基于奥本海姆《信号与系统》第二版编写,主要是为了自己学习的复习与加深。一、用信号样本表示连续时间信号:采样定理1、
绘制sin曲线 x = 0:pi/10:2*pi; y = sin(x); plot(x,y); 设置样式 连续线、点线等 x = 0:pi/10:2*pi; y = sin(x);
手把手教用matlab做无人驾驶(五)-matlab实现自动Ground
1.在matlab中命令行输入:groundTruthLabeler('caltech_cordova1.avi'),会弹出: 2.点击左上角的Label,在弹出的窗口填写car: 3.
clear all; theta=0:0.01*pi:pi*2; x=sin(theta); y=cos(theta); z=cos(4*theta); figure; plot3(x,y,z,'rs','LineWidth',2,'Mar
显示索引图像和灰度图像>> [X,map]=imread('trees.tif');>> gmap=rgb2gray(map);>> figure,imshow(X,map);>> figure,imshow(X,gm